Optical-inertial Synchronization of MoCap Suit with Single Camera Setup for Reliable Position Tracking
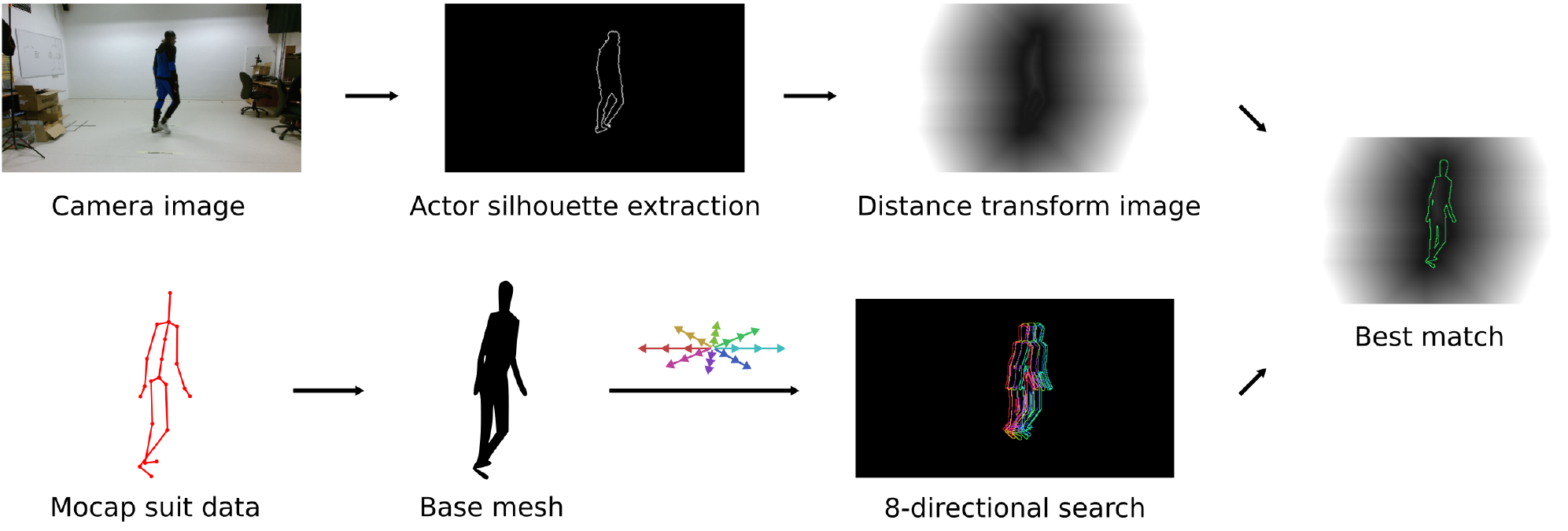
We propose a method for synchronization of an inertial motion capture suit and a single camera optical setup. Proposed synchronization is based on an iterative optimization of an energy potential in image space, minimizing the error between the camera image and a rendered virtual representation of the scene. For each frame, an input skeleton pose from the mocap suit is used to render a silhouette of a subject. Moreover, the local neighborhood around the last known position is searched by matching the silhouette to the distance transform representation of the camera image based on Chamfer matching. Using the combination of the camera tracking and the inertial motion capture suit, it is possible to retrieve the position of the joints that are hidden from the camera view. Moreover, it is possible to capture the position even if it cannot be captured by the suit sensors. Our system can be used for both real-time tracking and off-line post-processing of already captured mocap data.
Downloads
Citation
Adam Riečický, Martin Madaras, Michal Piovarči, and Roman Ďurikovič 2018. Optical-inertial Synchronization of MoCap Suit with Single Camera Setup for Reliable Position Tracking. In Proceedings of the 13th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications - GRAPP, ISBN 978-989-758-287-5; ISSN 2184-4321, pages 40-47.@conference{Riecicky2018,
author = { Adam Rie\v{c}icky and Martin Madaras and Michal Piovar\v{c}i and Roman \v{D}urikovi\v{c}},
title={Optical-inertial Synchronization of MoCap Suit with Single Camera Setup for Reliable Position Tracking},
booktitle={Proceedings of the 13th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications - GRAPP,},
year={2018},,
pages={40-47},
publisher={SciTePress},
organization={INSTICC},
doi={10.5220/0006531100400047},
isbn={978-989-758-287-5},
issn={2184-4321},
url = {http://doi.acm.org/10.1145/3083157.3083162},
doi = {10.1145/3083157.3083162},
acmid = {3083162},
publisher = {ACM},
address = {New York, NY, USA}
}
Collaborations